 Matthew Wilson
Matthew Wilson

I work at Tesla as a machine learning engineer on the Autopilot team. Previously, I was a masters student in computer science at the University of British Columbia (UBC), working on robotics and reinforcement + deep learning research, advised by Michiel van de Panne. Before that, I worked on similar research for my undergraduate thesis at the University of Utah (2019) as a member of the LL4MA lab, advised by Tucker Hermans.
CV / GitHub / Twitter / LinkedIn / Stack Overflow
News
- Aug 2021: I joined Tesla Autopilot as a software engineer
- Apr 2021: boxLCD paper was accepted to the ICLR 2021 Workshop on Deep Learning for Simulation (SimDL)!
- Feb 2021: I released boxLCD and generative_models repos, and new blog posts on the Future of Robot Learning and Learned Simulators
- Nov 2019: Our work won the Best System Paper Award at CoRL 2019!
- Sep 2019: Our work on “Learning to Manipulate Object Collections Using Grounded State Representations” was accepted to the Conference on Robot Learning (CoRL) 2019!
- Jun 2018: I wrote up an answer to a stackoverflow question on PPO (Proximal Policy Optimization)
Research Projects
boxLCD: A Simple Testbed for Learned Simulator and World Model Research
ICLR 2021 SimDL Workshop
[GitHub Project] [Blog Posts][Paper]
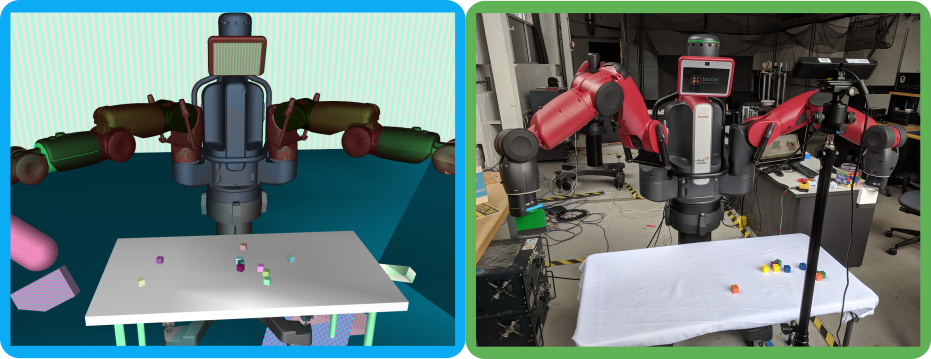
Learning to Manipulate Object Collections
Using Grounded State Representations
Using Grounded State Representations
Matthew Wilson, Tucker Hermans
CoRL 2019 (Oral, Best System Paper)
[arXiv] [Project Page] [Code]